Natural Policy Gradients, TRPO, A2C
Most of the recent successes in reinforcement learning comes from applying a more sophisticated optimization problem to policy gradients. This week I learned about advanced policy gradient techniques using algorithms such as Natural Policy Gradients, TRPO, and A2C.
I implemented Lab 4 provided by the Deep RL Bootcamp [1] [3]. My code is here [GitHub Source]
Standard Policy Gradient Algorithm
I had already done some training of Atari’s Pong during Week 4 with policy gradients and Tensorflow. In Lab 4, we made the gradient calculations manually.
Gradient Calculation for One Timestep
R_t = (discount * R_tplus1) + r_t
grad_t = get_grad_logp_action(theta, s_t, a_t) * (R_t -b_t)Accumulate Gradient Across Timesteps
grad += grad_tUpdate Parameters
theta += learning_rate * gradNatural Policy Gradient
Natural Policy Gradient improves on the standard policy gradient algorithm by approximating an optimization problem using a Fisher Information Matrix and step size.
Compute KL-divergence Hessian/Fisher Information Matrix
Take the parameters (theta) and calculate the gradient for an observation and action pair. Add the gradient values to a matrix.
d = len(theta.flatten())
F = np.zeros((d, d))
for ob, action in zip(all_observations, all_actions):
grad_logp = get_grad_logp_action(theta, ob, action).flatten()
F += np.outer(grad_logp, grad_logp)
F /= len(all_actions)Compute Natural Gradient
Take the Fisher Information Matrix (F) from above and add small values (reg) along the diagonal to ensure it’s a positive definite, then invert it. Multiply the F_inv with the policy gradient.
F_inv = np.linalg.inv(F + reg * np.eye(F.shape[0]))
natural_grad = F_inv.dot(grad.flatten())Compute Step Size
Using the second order approximation to the KL divergence, compute the adaptive step size using the natural gradient (natural_grad), the Fisher Information Matrix (F), and natural_step_size.
g_nat = natural_grad.flatten()
step_size = np.sqrt((2 * natural_step_size) / (g_nat.T.dot(F.dot(g_nat))))Update Parameters
theta += step_size * natural_gradAdvanced Policy Gradients
When calculating the surrogate loss, the gradient can be made more invariant by averaging over time steps in different trajectories. The distribution parameters (dists) are calculated using a flattened list of observations across all trajectories in a batch.
Surrogate loss is computed by taking the log likelihood or probability of the actions (all_acts) under the distribution parameters (dists). Multiply this value with the estimated advantages (all_advs) and take the negative mean.
Surrogate Loss for Policy Gradient
surr_loss = -F.mean(dists.logli(all_acts) * all_advs)Trust Region Policy Optimization (TRPO)
TRPO [4] uses a constraint on the KL divergence. The region defined by this constraint is called the trust region. In addition, it computes the approximate natural gradient using conjugate gradient.
Surrogate Loss for TRPO
TRPO modifies the Surrogate Loss calculation to calculate the likelihood ratio between the old and new distribution parameters before multiplying it with the estimated advantages and taking the negative mean:
likelihoods = new_dists.likelihood_ratio(old_dists, all_acts)
loss = -F.mean(likelihoods * all_advs)KL Divergence
Calculate the average KL divergence between the old and new distribution parameters.
kl = F.mean(old_dists.kl_div(new_dists))(Synchronous) Advantage Actor-Critic (A2C)
Combines Policy Gradients and Deep Q Learning using two networks, the actor and critic. The Actor network takes the observation and outputs the best action in a continuous space. The Critic takes the observation and actor’s action as inputs and predicting Q values. The Actor will move in the direction of suggested by the Critic.
Compute Returns and Advantages
Start at time step t and use future_rewards to calculate empirical returns and advantages.
returns = np.zeros([rewards.shape[0] + 1, rewards.shape[1]])
returns[-1, :] = next_values
for t in reversed(range(rewards.shape[0])):
future_rewards = discount * returns[t + 1, :] * (1 - dones[t, :])
returns[t, :] = rewards[t, :] + future_rewards
returns = returns[:-1, :]
advs = returns - valuesTotal Loss for A2C
Use the surrogate loss implementation from standard policy gradient, but add an entropy bonus with coefficient ent_coeff. When calculating total_loss, use the coefficient vf_loss_coeff with the value function loss from the Critic.
policy_loss = -F.mean(logli * all_advs + ent_coeff * ent)
vf_loss = F.mean(F.square(all_returns - all_values))
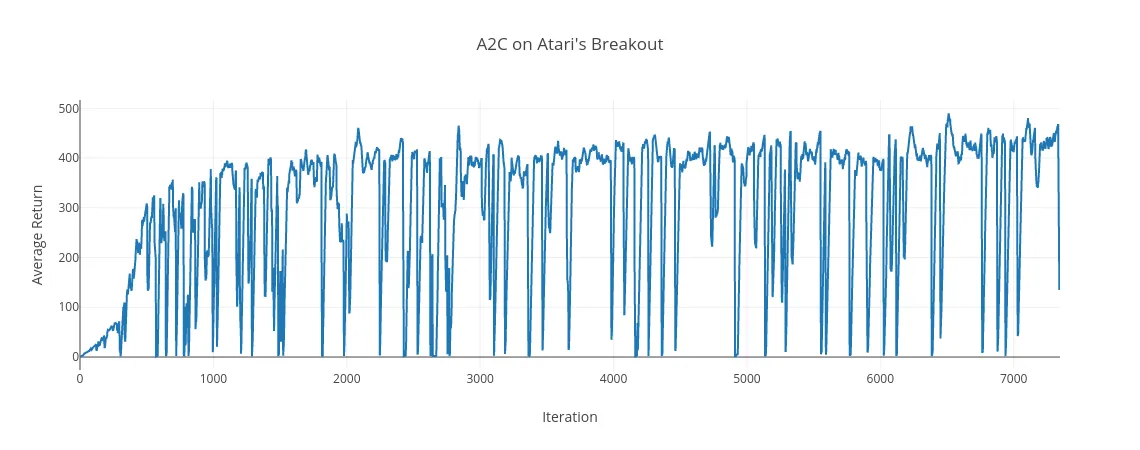
total_loss = policy_loss + vf_loss * vf_loss_coeffA2C on Breakout
Here is the Average Rewards after training A2C on Atari’s Breakout:
Trained Policy Playing Breakout:
References
- John Schulman. “Deep RL Bootcamp Core Lecture 5 Natural Policy Gradients, TRPO, and PPO”. Video | Slides
- Sergey Levine. “CS294 Learning policies by imitating optimal controllers”. Video | Slides
- Deep RL Bootcamp Lab 4: Policy Optimization Algorithms. Website
- John Schulman et al. “Trust Region Policy Optimization”. PDF.
- Dimitri P. Bertsekas. “Dynamic Programming and Optimal Control” Website.